












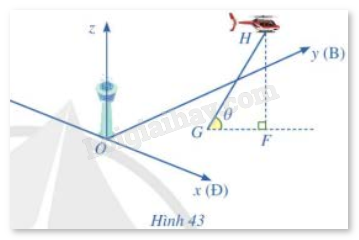
Để thực hiện công tác bảo trì cầu Mỹ Thuận 2, các kỹ sư sử dụng hệ thống máy bay không người lái (UAV) tích hợp công nghệ Bathymetric LiDAR. Hệ thống này phát ra các xung laser xanh lá (green laser) theo đường thẳng từ điểm C(20; 60; 50) nằm trên đỉnh tháp cầu, đi qua phao tiêu quan trắc B(a; b; c) trên mặt nước và chiếu đến mục tiêu A(15; 10; -50) nằm trên bề mặt lớp cát bồi lắng ở chân trụ cầu. Hệ trục tọa độ Oxyz có gốc O tại mặt nước, mặt phẳng (Oxy) là mặt nước sông, trục Oz hướng thẳng đứng lên trên (đơn vị: mét).
a) Đường thẳng AC biểu diễn quỹ đạo của tia laser có phương trình chính tắc là: $\dfrac{x - 20}{1} = \dfrac{y - 60}{10} = \dfrac{z - 50}{20}$.
b) Sau khi xác định mục tiêu A, các kỹ sư vận hành một robot dò tìm chạy trên một thanh ray bảo trì d nằm song song với mặt nước, cách mặt nước 5 m. Biết rằng hình chiếu vuông góc của thanh ray d lên mặt nước là một đường thẳng đi qua phao tiêu B và có vectơ chỉ phương $\overset{\rightarrow}{u} = (2;1;0)$. Để nhận được tín hiệu mạnh nhất từ mục tiêu A, robot cần di chuyển đến vị trí M(a'; b'; c') trên thanh ray d sao cho khoảng cách AM ngắn nhất. Khi đó a' + b' - c' = 34.
c) Tọa độ phao tiêu B thỏa mãn a + b + c = 52,5.
d) Khi xung laser truyền trong nước, vận tốc của nó thay đổi theo thời gian t (đơn vị: ns) bởi hàm số $v(t) = 0,22 + 0,01t$ (m/ns), với $t \geq 0$ là thời gian tính từ thời điểm xung laser chạm mặt nước. Khi đó, quãng đường tia laser đã đi được trong nước sau 10 ns kể từ khi chạm mặt nước là 2,475 mét.
a) Đường thẳng AC biểu diễn quỹ đạo của tia laser có phương trình chính tắc là: $\dfrac{x - 20}{1} = \dfrac{y - 60}{10} = \dfrac{z - 50}{20}$.
b) Sau khi xác định mục tiêu A, các kỹ sư vận hành một robot dò tìm chạy trên một thanh ray bảo trì d nằm song song với mặt nước, cách mặt nước 5 m. Biết rằng hình chiếu vuông góc của thanh ray d lên mặt nước là một đường thẳng đi qua phao tiêu B và có vectơ chỉ phương $\overset{\rightarrow}{u} = (2;1;0)$. Để nhận được tín hiệu mạnh nhất từ mục tiêu A, robot cần di chuyển đến vị trí M(a'; b'; c') trên thanh ray d sao cho khoảng cách AM ngắn nhất. Khi đó a' + b' - c' = 34.
c) Tọa độ phao tiêu B thỏa mãn a + b + c = 52,5.
d) Khi xung laser truyền trong nước, vận tốc của nó thay đổi theo thời gian t (đơn vị: ns) bởi hàm số $v(t) = 0,22 + 0,01t$ (m/ns), với $t \geq 0$ là thời gian tính từ thời điểm xung laser chạm mặt nước. Khi đó, quãng đường tia laser đã đi được trong nước sau 10 ns kể từ khi chạm mặt nước là 2,475 mét.
Áp dụng phương pháp tọa độ trong không gian.
a) Đúng. $\left. \overset{\rightarrow}{AC} = (5;50;100)\Rightarrow\overset{\rightarrow}{u} = \dfrac{1}{5}\overset{\rightarrow}{AC} = (1;10;20) \right.$.
Đường thẳng AC đi qua C(20; 60; 50) và có VTCP $\overset{\rightarrow}{u} = (1;10;20)$ nên có phương trình chính tắc là: $\dfrac{x - 20}{1} = \dfrac{y - 60}{10} = \dfrac{z - 50}{20}$.
c) Đúng. Viết lại phương trình quỹ đạo tia laser là đường thẳng AC: $\left\{ \begin{array}{l} {x = 20 + t} \\ {y = 60 + 10t} \\ {z = 50 + 20t} \end{array} \right.$.
Điểm phao tiêu B là giao điểm của AC ban đầu với mặt phẳng Oxy, do đó:
$\left. c = 0\Rightarrow 50 + 20t = 0\Rightarrow t = - 2,5 \right.$.
Suy ra $a = x_{B} = 20 + ( - 2,5) = 17,5$ và $b = y_{B} = 60 + 10( - 2,5) = 35$.
Vậy $a + b + c = 52,5$.
d) Sai. Quãng đường s tia laser đi trong nước sau 10 ns kể từ khi chạm mặt nước chính là $s = {\int_{0}^{10}{(0,22 + 0,01t)dt}} = 2,7$ (m).
b) Sai. Vì hình chiếu của d lên mặt nước (z = 0) đi qua B(17,5; 35; 0) và có vectơ chỉ phương $\overset{\rightarrow}{u} = (2;1;0)$, đường thẳng d cách mặt nước 5 m nên d có phương trình tham số: $\left\{ \begin{array}{l} {x = 17,5 + 2t} \\ {y = 35 + t} \\ {z = 5} \end{array} \right.$.
Do M di chuyển trên thanh ray d, tọa độ của M có dạng: M(17,5 + 2t; 35 + t; 5), AM = (2,5 + 2t; 25 + t; 55).
Khoảng cách AM ngắn nhất khi và chỉ khi:
$\left. AM\bot{\overset{\rightarrow}{u}}_{d}\Leftrightarrow\overset{\rightarrow}{AM}.{\overset{\rightarrow}{u}}_{d} = 0 \right.$
$\left. \Leftrightarrow 2(2,5 + 2t) + 1.(25 + t) = 0 \right.$
$\left. \Leftrightarrow 5t + 30 = 0\Leftrightarrow t = - 6 \right.$.
Suy ra tọa độ robot tối ưu là:
$\left. M(5,5;29;5)\Rightarrow a' + b' - c' = 29,5 \right.$.






Danh sách bình luận